
Labview
Cinemática Directa con Labview, Comprobación con RobotStudio

En el anterior post se abordo los conceptos clásicos que involucran la localización espacial del robot en un conjunto de sistemas de coordenadas. Por lo tanto en este post se pondrán en practicas esos conceptos teóricos valiendonos de la cinemática directa, que es la ciencia que abarca el movimiento sin involucrar las fuerzas que lo originan.
Para esto se elaborara un análisis en los eslabones vinculados en el movimiento del robot (Conjuto de eslabones = Estructura Robot) haciendo los cálculos matematicos necesarios para cada uno de ellos. Esto nos permitira conocer el valor de las coordenadas de la herramienta de trabajo o el TCP (tool center pointer) de nuestro Robot.
Figura1: TCP o efector final
El algoritmo a utilizar para el análisis de los eslabones es el muy reconocido Algoritmo de Denavit-Hartemberg que nos permite conocer la ubicacion de los sistemas de referencia para cada una de las articulaciones. Mas informacion

Figura2: Eslabones y transformaciones de Denavit-Hartemberg (

Usaremos Labview valiendonos de su interfaz gráfica de programación y después realizaremos una comprobación de esos datos obtenidos en nuestro programa con el Software de programación y simulación de Robots de la Compañía ABB Robotics RobotStudio.
El primer robot a analizar es el IRB120 tomando en cuenta los valores del fabricante como longitud de los eslabones, rango de apertura de los ángulos de las articulaciones etc. estos datos aparecen en el Datasheet del IRB120.

Figura3: Datos característicos del IRB120
Al hacer el respectivo análisis de las transformaciones en cada par de eslabones nos queda la siguiente Matriz con los datos característicos de cada eslabón.

Figura4: Matriz de Valores de cada eslabón del IRB120
Ahora que se poseen los datos de cada eslabón usaremos las matrices de transformaciones homogeneas entre cada sistema para encontrar el valor en coordenadas cartesianas del Efector final (TCP), debido a que son 6 eslabones tendremos 6 Matrices que definiran la orientacion de cada una de ellas, consecutivamente aplicaremos una multiplicación de cada matriz característica y de esta forma tendremos el valor de X, Y y Z del TCP.
Cabe destacar que los calculos paso a paso de estas matrices no seran mostrados aca ya que nos estamos valiendo del toolkit de Labview llamado MathScrip (Desarrollado en conjunto con Matlab y National Instruments) Dejando de un lado el calculo, estaremos listos para obtener el valor de X, Y y Z del efector final si conocemos el angulo de cada articulacion.
A continuacion se muestra el codigo del Mathscrip del programa del VI de Labview
%%%% %%%%%%%%%%%%%PASANDO ANGULO A RADIANES %%%%%%%%%%%%%%%%%%%%%%
th1= (pi*th1x)/180;
th2y=(pi*th2x)/180;
th3= (pi*th3x)/180;
th4= (pi*th4x)/180;
th5= (pi*th5x)/180;
th6y=(pi*th6x)/180;
%%%%%% %%%%MATRIZ DE DENAVIT- HARTEMBERG MODEL IRB 120 %%%%%%%%%%%%%%%%%%%
a1 = 0; d1 = 290; alpha1 = -pi/2; % th1r = 0;
a2 = 270; d2 = 0; alpha2 = 0; th2 = th2y -pi/2;
a3 = 70; d3 = 0; alpha3 = -pi/2; %th3r = pi;
a4 = 0; d4 = 302; alpha4 = pi/2; % th4r = 0;
a5 = 0; d5 = 0; alpha5 = -pi/2; %th5r = 0;
a6 = 0; d6 = 72; alpha6 = 0; th6 = th6y +pi;
%%%% %%%%%%%%%%%%%PASANDO ANGULO A RADIANES IRB140 %%%%%%%%%%%%%%%%%%%%%%
%th1= (pi*th1x)/180;
%th2y=(pi*th2x)/180;
%th3y= (pi*th3x)/180;
%th4= (pi*th4x)/180;
%th5= (pi*th5x)/180;
%th6y=(pi*th6x)/180;
%%%%%% %%%%MATRIZ DE DENAVIT- HARTEMBERG MODEL IRB 140 %%%%%%%%%%%%%%%%%%%
%a1 = 70; d1 = 352; alpha1 = -pi/2; % th1 = th1y + pi/2;
%a2 = 360; d2 = 0; alpha2 = 0; th2 = th2y -pi/2;
%a3 = 0; d3 = 0; alpha3 = pi/2; th3 = th3y +pi;
%a4 = 0; d4 = 380; alpha4 = -pi/2; %th4 = th4y +pi ;
%a5 = 0; d5 = 0; alpha5 = pi/2; % th5= th5y +pi/2 ;
%a6 = 0; d6 = 65; alpha6 = pi/2; th6 = th6y – pi;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% %%%%%%% MATRICES DE TRANSFORMACION HOMEGENEA %%%%%%%%%%%%%%%%%%%%%%%%
A01 = [cos(th1) -cos(alpha1)*sin(th1) sin(alpha1)*sin(th1) a1*cos(th1);
sin(th1) cos(alpha1)*cos(th1) -sin(alpha1)*cos(th1) a1*sin(th1);
0 sin(alpha1) cos(alpha1) d1;
0 0 0 1];
A12 = [cos(th2) -cos(alpha2)*sin(th2) sin(alpha2)*sin(th2) a2*cos(th2);
sin(th2) cos(alpha2)*cos(th2) -sin(alpha2)*cos(th2) a2*sin(th2);
0 sin(alpha2) cos(alpha2) d2;
0 0 0 1];
A23 = [cos(th3) -cos(alpha3)*sin(th3) sin(alpha3)*sin(th3) a3*cos(th3);
sin(th3) cos(alpha3)*cos(th3) -sin(alpha3)*cos(th3) a3*sin(th3);
0 sin(alpha3) cos(alpha3) d3;
0 0 0 1];
A34 = [cos(th4) -cos(alpha4)*sin(th4) sin(alpha4)*sin(th4) a4*cos(th4);
sin(th4) cos(alpha4)*cos(th4) -sin(alpha4)*cos(th4) a4*sin(th4);
0 sin(alpha4) cos(alpha4) d4;
0 0 0 1];
A45 = [cos(th5) -cos(alpha5)*sin(th5) sin(alpha5)*sin(th5) a5*cos(th5);
sin(th5) cos(alpha5)*cos(th5) -sin(alpha5)*cos(th5) a5*sin(th5);
0 sin(alpha5) cos(alpha5) d5;
0 0 0 1];
A56 = [cos(th6) -cos(alpha6)*sin(th6) sin(alpha6)*sin(th6) a6*cos(th6);
sin(th6) cos(alpha6)*cos(th6) -sin(alpha6)*cos(th6) a6*sin(th6);
0 sin(alpha6) cos(alpha6) d6;
0 0 0 1];
A06 = A01*A12*A23*A34*A45*A56;
x = A06(1,4)
y = A06(2,4)
z = A06(3,4)
El código posee dos matrices características una para el IRB120 y otro para el IRB140 solo basta con descomentar el código característico del IRB140 y comentar el de IR120 para obtener los datos.
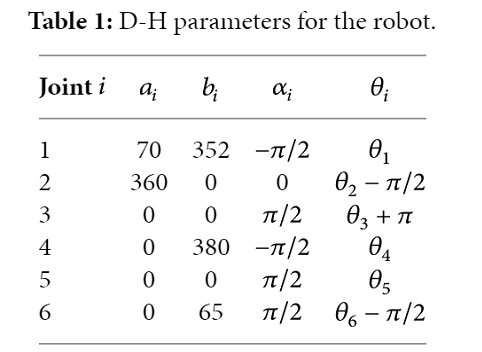
Figura5: Matriz de Valores de cada eslabón del IRB140
Diagrama de bloques de Labview
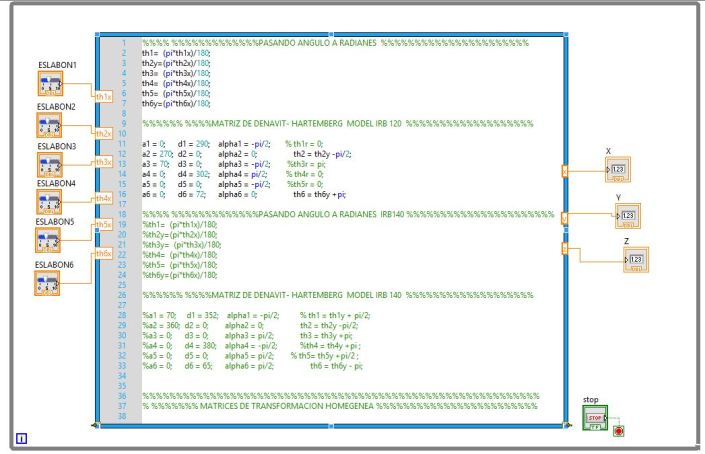
Figura6: Diagrama de bloques en labview junto con el script.
Panel Frontal Labview
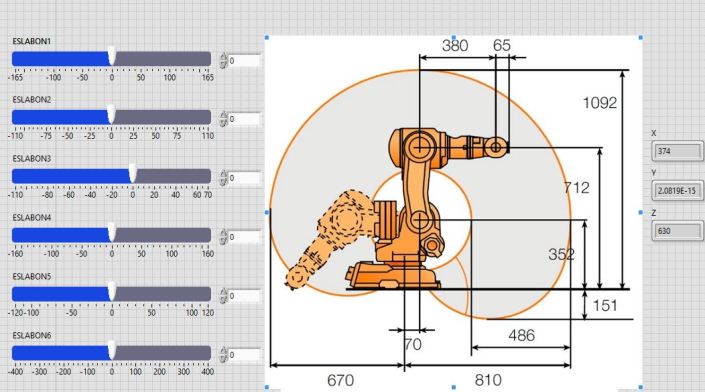
Figura7: Interfaz de Labview Acá se puede ajustar el Angulo de cada eslabón y se mostraran el valor de XYZ
A continuación se muestran los datos obtenidos y comparados con RobotStudio.Para una posicion de 0º en todos los 6 eslabones el valor de X = 374 Y=0 Z=630 esta es la posiciones inicial del robot donde estos datos siempre estan referenciados al vector universal U
Podemos ver la posicion inicial del robot en RobotStudio y los valores de XYZ barrita de valores TCP, que coinciden con el VI de Labview.
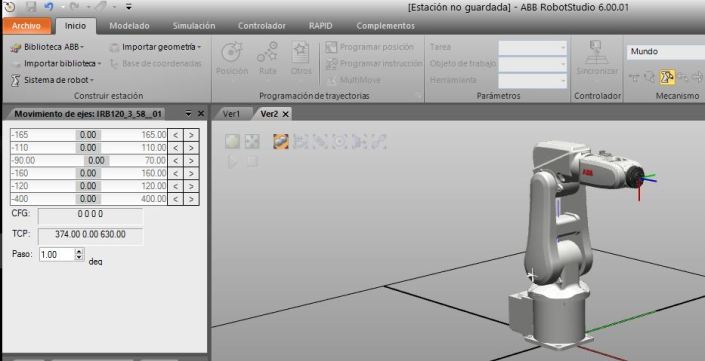
Figura8: Interfaz de Robot Studio parte izquierda muesta los datos de ajuste en grados e informacion de la posicion del TCP (XYZ)
Demostración (1) IRB120 (se mostraran interfaz de Labview y despues de RobotStudio)
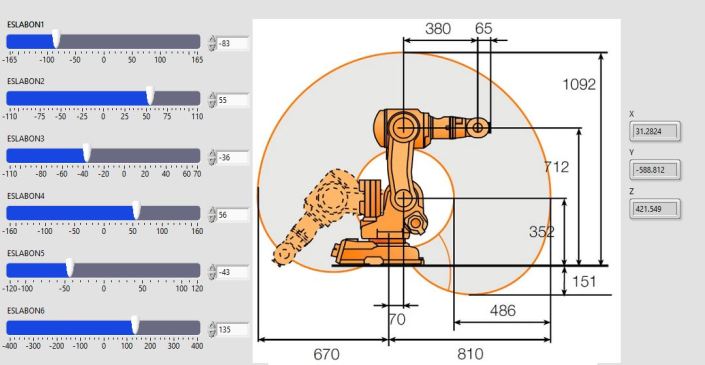
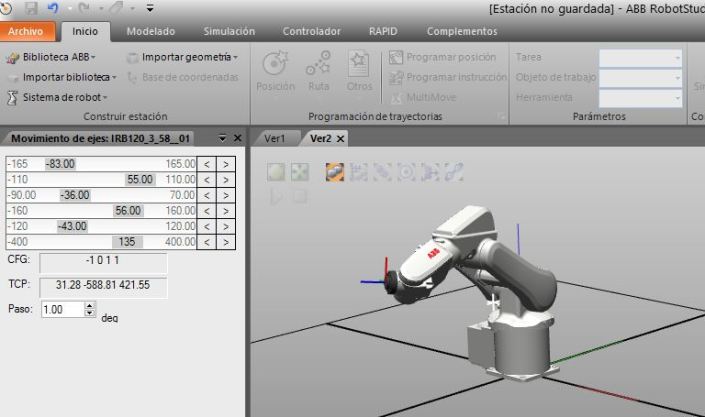
Figura9: Demostracion (1) IRB120
Demostración (2) IRB140 (Se ha descomentado y comentado respectivamente en El programa (: ) Mostrando los mismos angulos que el IRB120 y se muestra la diferencia de la posicion del TCP ya que los eslabones no tienen la misma configuración o longitud
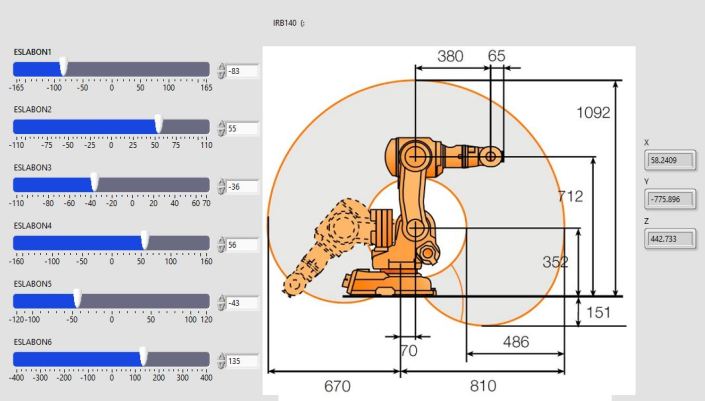

Figura10: Demostracion (2) IRB140
Podemos ver que los valores del angulo y coordenadas XYZ del TCP para el IRB120 y el IRB140 para ambas interfaces coinciden.
De esta forma concluimos con la practica.
Sistemas electrónicos embebidos tendencia con gran visión
Como estudiante de ingeniería electrónica es de vital importancia conocer las tendencias futuristas de diversos sistemas electrónicos que es lo que marcara el mercado y que podemos hacer como estudiantes para desarrollar las habilidades que nos demandara la amplia carrera de la ingeniería electrónica en este articulo se describirá una de las visiones que ya esta en pañales pero con un gran auge de crecimiento en la industria electrónica, grandes empresas como Microsoft, Apple e Intel lo denominan el Internet de la Cosas (IoT) .

¿Que es un sistema Embebido?
Un sistema embebido son un conjunto de dispositivos integrados en un producto con el fin de controlar una o varias funciones, con recursos tecnológicos dedicados donde se pretende aprovechar al máximo la utilidad del sistema, estos se encargan de ser “transparentes para el usuario” permitiendo generar confianza al usarse, estos sistemas que integran hardware y software y comunicaciones son diseñados en diversas tecnologías existentes como microprocesadores, FPGA, microcontroladores o PLC’s de acuerdo al nivel, requerimientos y complejidad del sistema.
Según el tipo de Tecnologia se busca
- Confiabilidad y seguridad
- Arquitecturas de referencia
- Conectividad
- Ciclo de vida de desarrollo de sistemas embebidos
¿Hacia donde se dirige el desarrollo de sistemas embebidos?
Diversos dispositivos electrónicos nos rodean y estamos en constante contacto con ellos los cuales poseen procesamiento lógicos importantes como lo es un sistema embebido tales dispositivos como smartphones, tabletas o portátiles estos cuentan con funciones para administar el uso de WiFi bluetooth, gps etc. A medida que avanza la búsqueda de optimizar muchas funciones en un dispositivo estos a su vez se vuelven mas complejos.
Monitoreo, prevención de fallas, mejoras de seguridad procesamiento de audio e imágenes, comunicación inalámbrica y señales como entradas para mediciones precisas o salidas a actuadores que todos a su vez cuentan con sistemas muy precisos y dedicados requieren de la atención de cualquier ingeniero electrónico donde se debe cultivar una constante actualización de las múltiples tendencias tecnológicas de la actualidad.
National Instruments resalta los detalles más sobresalientes de los Sistemas Embedded por parte de la compañía, otorgando información sobre los retos más apremiantes a los que se enfrentan los grupos de diseño encargados de desarrollar sistemas de control y monitorización embebidos.

Dr. James Truchard, CEO y co-fundador de National Instruments, quien explica:
“Nuestros clientes están trabajando para solucionar los problemas más difíciles de ingeniería que enfrenta la sociedad, tales como los 14 grandes retos que National Instruments ha identificado mediante la Academia Nacional de Ingenierías. Esos retos incluyen tareas monumentales como ingeniería-inversa del cerebro humano, adquisición de energía desde fusión, mejores medicinas, restauración de infraestructura urbana y suministro global de acceso al agua limpia.”, comentó el Dr. T.”
En su intento por reforzar la demanda de mayores soluciones para los ingenieros diseñadores de aplicaciones embebidas, el fabricante de Microcontroladores (MCUs) dio a conocer la tienda su nueva tienda en línea “Gallery.Atmel.com” enfocada a la venta de Apps para embebidos compatibles con arquitectura Atmel.

Los constantes retos técnicos a los que se enfrentan los ingenieros diseñadores de sistemas embebidos, son cada dia mas complejos lo cual nos deja la pregunta o la espina como futuros profesionales de la electrónica que es indispensable profundizar el el uso de plataformas o herramientas que nos permitan integrar sistemas de uso productivo y eficiente
Cada vez es más importante el software de desarrollo para aplicaciones embebidas, sobre todo en el diseño de dispositivos como smartphones o controles industriales, y desafortunadamente las soluciones de las herramientas actuales aun no cuentan con los elementos completos que demandan los ingenieros, es decir, hasta ahora son pocos o nulos los software que ofrecen una funcionalidad idónea para el desarrollo de aplicaciones embebidas que eviten la compra de otras herramientas para realizar otras operaciones del proyecto Si se desea desarrollar una aplicación inteligente para un proceso ya sea usando programacion android para una comunicación con un smarthphone o un programa en visual studio que nos permite recepcionar datos en nuestro computador.

La empresa National Instruments nos ofrece una amplia gama de equipos ya desarrollados por la compañia que conjunto con su programa LabView nos permite conectar diferentes variables de medicion ahorrandonos el proceso de Hardaware y comunicación entre los dispositivos despues que se obtienen los datos se puede jugar con las variables obtenidadas recepcionandolas en el computador donde el software de labview con su programación gráfica nos simplifica mucho permitiendonos crear codigo para compartir los datos HTML en un pagina web, guardarlos en un archivo excel o la opcion de ser mostrados en el computador donde el usuario pueda interactuar con el sistema, todas esta utilidades tienen una gran confiabilidad pero son muy caros limitandonos con el precio.
Ejemplos de sistema simple embedded usando Diferentes tecnologias
- Uso de microcontroladores con comunicacion USB (Microchip PIC18F4550) y recepcionar los datos en el software de Labview.
- Modelación de sistemas embebidos con Matlab.
- Uso de comunicaciones via bluetooh.
- Comunicacion via ethernet para compartir datos de mediciones en la Web.
De acuerdo al nivel de complejidad se deberan ir usando diferente herramientas que nos permitan modelar eficazmente un sistema embebido

Como futuro ingeniero es indispensable usar muchas alternativas que nos permitan ser competitivos en el mercado ya sea generar soluciones mas baratas que me permitan obtener el mismo resultado que al comprar un sistema ya dedicado que en ocasiones es sobrevalorado ya que ciertos requerimientos del problema se quedan chicos al potencial del sistemadedicado que se compra, un ejemplo es usar la NiDaq Rio de National Instruments para medir la temperatura y el requerimiento unico de porque lo estoy usando es para mandar los datos via Web, aumentadonos los costos y bajando nuestra competitividad en el mercado, es por tal razon que es de vital importancia estar en constante actulizacion  identificar en el mercado que dispositivo me resuelve y cumple con mis requerimientos para mi modelacion del sistema que me permita obtener un sistema confiable y que me permita como vendedor de soluciones dedicadas obtener mas ganancias, cada dia la industria electronica nos ofrece algo nuevo, ¿que estamos haciendo para identificarlos? es la pregunta clave que marcara nuestra competitividad.
identificar en el mercado que dispositivo me resuelve y cumple con mis requerimientos para mi modelacion del sistema que me permita obtener un sistema confiable y que me permita como vendedor de soluciones dedicadas obtener mas ganancias, cada dia la industria electronica nos ofrece algo nuevo, ¿que estamos haciendo para identificarlos? es la pregunta clave que marcara nuestra competitividad.
